Электродвигателя необходим для плавного разгона и торможения. Широкое применение получили такие устройства в промышленности. С их помощью изменяют скорость движения вращения вентиляторов. Двигатели на 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, которыми изменяется скорость вращения вентилятора печки в машинах. Это один из типов регуляторов. Только он не предназначен для плавного запуска. Изменение скорости вращения происходит ступенчато.
Применение частотных преобразователей
В качестве регуляторов оборотов и 380В используются частотные преобразователи. Это высокотехнологичные электронные устройства, которые позволяют кардинально изменить характеристики тока (форму сигнала и частоту). В их основе находятся мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа прибора управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя происходит плавно.
Поэтому используются в нагруженных механизмах. Чем медленнее разгон, тем меньшие нагрузки будет испытывать конвейер или редуктор. Все частотники оснащены несколькими степенями защиты - по току, нагрузке, напряжению и прочими. Некоторые модели частотных преобразователей питаются от однофазного делают из него трехфазное. Это позволяет подключать асинхронные моторы дома без использования сложных схем. И не потеряется мощность при работе с таким устройством.
Для каких целей используются регуляторы
В случае с асинхронными двигателями регуляторы оборотов необходимы для:
- Существенной экономии электроэнергии . Ведь не в каждом механизме требуется большая скорость вращения мотора - порой ее можно уменьшить на 20-30%, а это позволит сократить расходы на электроэнергию вдвое.
- Защиты механизмов и электронных цепей . С помощью преобразователей частоты можно осуществлять контроль температуры, давления и многих других параметров. Если двигатель работает в качестве привода насоса, то в емкости, в которую он накачивает воздух или жидкость, нужно установить датчик давления. И при достижении максимального значения мотор просто отключится.
- Совершения плавного пуска . Нет необходимости использовать дополнительные электронные устройства - все можно сделать с помощью изменений настроек частотного преобразователя.
- Снижения расходов на техническое обслуживание . При помощи подобных регуляторов оборотов электродвигателей 220В снижается риск выхода из строя привода и отдельных механизмов.

Схема, по которой построены частотные преобразователи, широко распространена во многих бытовых приборах. Нечто подобное можно встретить в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядниках телефонов, блоках розжига ламп подсветки современных ЖК-телевизоров и мониторов.
Как работают регуляторы вращения
Можно сделать своими руками регулятор оборотов электродвигателя, но для этого потребуется изучить все технические моменты. Конструктивно можно выделить несколько основных компонентов, а именно:
- Электродвигатель.
- Микроконтроллерную систему управления и блок преобразователя.
- Привод и механизмы, связанные с ним.
В самом начале работы, после подачи напряжения на обмотки, происходит вращение ротора двигателя с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому прибавляется нагрузка от механизма, который приводится в движение. В итоге на начальном этапе мощность и потребляемый ток возрастают до максимума.

Выделяется очень много тепла. Перегреваются и обмотки, и провода. Применение частотного преобразователя поможет избавиться от этого. Если установить плавный пуск, то до максимальной скорости (которая также регулируется устройством и может быть не 1500 об./мин, а всего 1000) двигатель будет разгоняться не сразу, а на протяжении 10 секунд (каждую секунду по 100-150 оборотов прибавлять). При этом нагрузка на все механизмы и провода уменьшится в разы.
Самодельный регулятор
Самостоятельно можно сделать регулятор оборотов электродвигателя 12В. Для этого потребуется переключатель на несколько положений и проволочные резисторы. С помощью последних меняется напряжение питания (а вместе с ним и частота вращения). Аналогичные системы можно использовать и для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы - на основе шестеренчатых приводов или вариаторов. Но они были не очень надежными. Электронные средства намного лучше себя показывают. Ведь они не такие громоздкие и позволяют более тонко настраивать привод.

Для изготовления регулятора вращения электродвигателя потребуется несколько электронных устройств, которые можно либо приобрести в магазине, либо снять со старых инверторных приборов. Неплохие результаты показывает симистор ВТ138-600 в схемах таких электронных устройств. Чтобы произвести регулировку, потребуется включить в схему переменный резистор. С его помощью изменяется амплитуда входящего на симистор сигнала.
Внедрение системы управления

Чтобы улучшить параметры даже самого простого устройства, потребуется в схему регулятора оборотов электродвигателя включить микроконтроллерное управление. Для этого нужно выбрать процессор с подходящим числом входов и выходов - для подключения датчиков, кнопок, электронных ключей. Для экспериментов можно применить микроконтроллер AtMega128 - самый популярный и простой в использовании. В свободном доступе можно найти множество схем с использованием этого контроллера. Самостоятельно их отыскать и применить на практике не составит труда. Чтобы он правильно работал, потребуется в него записать алгоритм - отклики на определенные действия. Например, при достижении температуры в 60 градусов (замер происходит на радиаторе прибора) должно произойти отключение питания.
В заключение
Если решите не делать самостоятельно устройство, а приобрести готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частоты. Желательно произвести расчет характеристик механизма, в котором планируется использовать регулятор напряжения электродвигателя. И не забудьте сопоставить с параметрами частотного преобразователя.
С вопросом регулировки оборотов приходится сталкиваться при работе с электроинструментом, приводом швейных машин и прочих приборов в быту и на производстве Регулировать обороты, просто понижая питающее напряжение, не имеет смысла - электродвигатель резко уменьшает обороты, теряет мощность и останавливается Оптимальным вариантом регулировки оборотов является регулирование напряжения с обратной связью по току нагрузки двигателя
В большинстве случаев в электроинструменте и других приборах применены универсальные коллекторные электродвигатели с последовательным возбуждением. Они хорошо работают как на переменном, так и на постоянном токе. Особенностью работы коллекторного электродвигателя является то, что при коммутации обмоток якоря на ламелях коллектора во время размыкания возникают импульсы противо-ЭДС самоиндукции Они равны питающим по амплитуде, но противоположны им по фазе. Угол смещения противо-ЭДС определяется внешними характеристиками электродвигателя, его нагрузкой и другими факторами. Вредное влияние противо-ЭДС выражается в искрении на коллекторе, потере мощности двигателя, дополнительном нагреве обмоток. Некоторая часть противо-ЭДС гасится конденсаторами, шунтирующими щеточный узел.
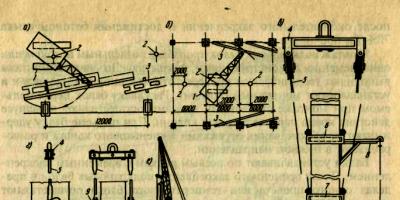
Рассмотрим процессы, протекающие в режиме регулирования с ОС, на примере универсальной схемы (рис 1). Резистивно-емкостная цепь R2-R3-C2 обеспечивает формирование опорного напряжения, определяющего скорость вращения электродвигателя.
При увеличении нагрузки скорость вращения электродвигателя падает, снижается и его крутящий момент. Противо-ЭДС, возникающая на электродвигателе и приложенная между катодом тиристора VS1 и его управляющим электродом, уменьшается. Вследствие этого напряжение на управляющем электроде тиристора возрастает пропорционально уменьшению противо-ЭДС. Дополнительное напряжение на управляющем электроде тиристора заставляет его включаться при меньшем фазовом угле (угле отсечки) и пропускать на электродвигатель больший ток, компенсируя тем самым снижение скорости вращения под нагрузкой. Существует как бы баланс импульсного напряжения на управляющем электроде тиристора, составленного из напряжения питания и напряжения самоиндукции двигателя. Переключатель SA1 позволяет при необходимости перейти на питание полным напряжением, без регулировки Особое внимание следует уделить подбору тиристора по минимальному току включения, что обеспечит лучшую стабилизацию скорости вращения электродвигателя
Вторая схема (рис 2) рассчитана на более мощные электродвигатели, применяемые в деревообрабатывающих станках, шлифмашинах, дрелях. В ней принцип регулировки остается прежним. Тиристор в данной схеме следует установить на радиатор площадью не менее 25 см2.

Для маломощных электродвигателей и при необходимости получить очень малые скорости вращения, можно с успехом применить схему на ИМС (рис 3). Она рассчитана на питание 12 В постоянного тока. В случае более высокого напряжения следует запитать микросхему через параметрический стабилизатор с напряжением стабилизации не выше 15В.

Регулировка скорости осуществляется путем изменения среднего значения напряжения импульсов, подаваемых на электродвигатель. Такие импульсы эффективно регулируют очень малые скорости вращения, как бы непрерывно "подталкивая" ротор электродвигателя. При высоких скоростях вращения электродвигатель работает обычным образом.
Весьма несложная схема (рис 4) позволит избежать аварийных ситуаций на линии железной дороги (игрушечной) и откроет новые возможности управления составами. Лампа накаливания во внешней цепи предохраняет и сигнализирует о коротком замыкании на линии, ограничивая при этом выходной ток.

Когда требуется регулировать обороты электродвигателей с большим крутящим моментом на валу, например в электролебедке, может пригодиться двухполупериодная мостовая схема (рис 5), обеспечивающая полную мощность на электродвигателе, что существенно отличает ее от предыдущих, где работала только одна полуволна питающего напряжения.

Диоды VD2 и VD6 и гасящий резистор R2 используются для питания схемы запуска. Задержка открывания тиристоров по фазе обеспечивается зарядом конденсатора С1 через резисторы R3 и R4 от источника напряжения, уровень которого определяется стабилитроном VD8 Когда конденсатор С1 зарядится до порога срабатывания однопереход-ного транзистора VT1, он открывается и запускает тот тиристор, на аноде которого присутствует положительное напряжение. Когда конденсатор разряжается, однопереходный транзистор выключается. Номинал резистора R5 зависит от типа электродвигателя и желаемой глубины обратной связи. Его величина подсчитывается по формуле
где Iм - эффективное значение максимального тока нагрузки для данного электродвигателя Предлагаемые схемы хорошо повторяемы, но требуют подбора некоторых элементов в зависимости от характеристик применяемого двигателя (практически невозможно найти подобные по всем параметрам электродвигатели даже в пределах одной серии).
Литература
1. Electronics Todays. Int N6
2. RCA Corp Manual
3. IOI Electronic Projects. 1977 p 93
5. G. E. Semiconductor Data Hand book 3. Ed
6 .Граф P. Электронные схемы. -М Мир, 1989
7. Семенов И. П. Регулятор мощности с обратной связью. - Радиолюбитель, 1997, N12, С 21.
Ротор турбинного компрессора
Как известно, трехфазные асинхронные электрические (эл.) двигатели, имеющие короткозамкнутый ротор, подключаются по схеме звезда или треугольник в зависимости от линейного напряжения, на которое рассчитана каждая обмотка.
При пуске особенно мощных эл. двигателей, подключённых по схеме треугольника, наблюдаются повышенные пусковые токи, которые в перегруженных сетях создают временное падение напряжения ниже допустимого предела.
Данное явление обусловлено конструктивными особенностями асинхронных эл. двигателей, у которых массивный ротор имеет достаточно большую инерционность, и при его раскрутке мотор работает в режиме перегрузки. Пуск электродвигателя усложняется, если на валу находится нагрузка с большой массой – роторы турбинных компрессоров, центробежных насосов или механизмы различных станков.
Способ уменьшения пусковых токов электродвигателя
Чтобы уменьшить токовые перегрузки и падение напряжения в сети, применяют особый способ подключения трехфазного эл. двигателя, при котором происходит переключение со звезды на треугольник по мере набора оборотов.
 Подключение обмоток двигателя: звездой (слева) и треугольником (справа)
Подключение обмоток двигателя: звездой (слева) и треугольником (справа)
При подключении соединенных звездой обмоток двигателя, рассчитанного на подключение треугольником в трехфазную сеть, напряжение, приведённое к каждой обмотке на 70% меньше от номинала. Соответственно, ток при пуске эл. двигателя будет меньшим, но следует помнить, что стартовый момент вращения также будет меньшим.
Поэтому переключение режимов звезда-треугольник нельзя применять для электродвигателей, изначально имеющих на валу неинерционную нагрузку, такую как вес груза лебедки или сопротивление поршневого компрессора.
 Недопустимо переключение режимов у электродвигателя, стоящего на поршневом компрессоре
Недопустимо переключение режимов у электродвигателя, стоящего на поршневом компрессоре
Для работы в составе таких агрегатов, имеющих большую нагрузку в момент пуска, применяют особые трехфазные эл. двигатели с фазным ротором, в которых пусковые токи регулируются с помощью реостатов.
Переключение звезда треугольник можно применять только для электродвигателей, имеющих на валу свободно вращающуюся нагрузку – вентиляторы, центробежные насосы, валы станков, центрифуг и другого подобного оборудования.
 Центробежный насос с асинхронным электродвигателем
Центробежный насос с асинхронным электродвигателем
Реализация смены режимов подключения обмоток двигателя
Очевидно, что для осуществления пуска трехфазного электромотора в режиме звезды с последующим переключением на соединение обмоток треугольником, необходимо применение нескольких трехфазных контакторов в пускателе.
 Набор контакторов в пускателе для переключения звезда-треугольник
Набор контакторов в пускателе для переключения звезда-треугольник
При этом нужно обеспечивать блокировку одномоментного срабатывания данных контакторов, а также должна быть обеспечена кратковременная задержка переключения, чтобы соединение звездой гарантированно отключилось прежде, чем включится треугольник, иначе произойдет трехфазное короткое замыкание.
Поэтому реле времени (РВ), которое используется в схеме для установки интервала переключения, также должно обеспечивать задержку 50-100 мс, чтобы не происходило короткого замыкания.
Способы осуществления задержки переключения
 Диаграмма времени переключения режимов
Диаграмма времени переключения режимов
Существует несколько принципов осуществления задержки при помощи:

 Ручной переключатель режимов
Ручной переключатель режимов
Классическая схема
Данная система достаточно проста, неприхотлива и надежна, но имеет существенный недостаток, который будет описан ниже и требует применения громоздкого и морально устаревшего реле времени.
Данное РВ обеспечивает задержку отключения из-за намагниченного сердечника, на размагничивание которого требуется некоторое время.
 Электромагнитное реле времени задержки
Электромагнитное реле времени задержки
Необходимо мысленно пройтись по цепях прохождения тока, чтобы понять работу данной схемы.
 Классическая схема переключения режимов с реле тока и времени
Классическая схема переключения режимов с реле тока и времени
После включения трехфазного автоматического выключателя АВ пускатель готов к работе. Через нормально замкнутые контакты кнопки «Стоп», и замыкаемый оператором контакт кнопки «Пуск» ток протекает через катушку контактора КМ. Силовые контакты КМ удерживаются во включенном состоянии «самоподхватом», благодаря контакту БКМ.
 На фрагменте приведенной выше схемы красной стрелкой указан шунтирующий контакт
На фрагменте приведенной выше схемы красной стрелкой указан шунтирующий контакт
Реле КМ необходимо для обеспечения возможности отключения двигателя кнопкой «Стоп». Импульс от кнопки «Пуск» также проходит через нормально замкнутые БКМ1 и РВ, запуская контактор КМ2, основные контакты которого обеспечивают подачу напряжения на соединение обмоток по типу звезда – осуществляется раскрутка ротора.
Поскольку в момент пуска КМ2 контакт БКМ2 размыкается, то КМ1, обеспечивающий включения соединения обмоток треугольником, никак не может сработать.
 Контакторы, обеспечивающие подключение звездой (КМ2) и треугольником (КМ1)
Контакторы, обеспечивающие подключение звездой (КМ2) и треугольником (КМ1)
Пусковые токовые перегрузки эл. двигателя заставляют практически мгновенно сработать РТ, включенное в цепи трансформаторов тока ТТ1, ТТ2. При этом цепь управления катушкой КМ2 шунтируется контактом РТ, блокируя работу РВ.
Одновременно с запуском КМ2 при помощи его дополнительного нормально разомкнутого контакта БКМ2 запускается реле времени, контакты которого переключаются, но срабатывания КМ1 не происходит, так как БКМ2 в цепи катушки КМ1 разомкнут.
 Включение реле времени — зеленая стрелка, переключающие контакты — красные стрелки
Включение реле времени — зеленая стрелка, переключающие контакты — красные стрелки
По мере набора оборотов пусковые токи уменьшаются и контакт РТ в цепи управления КМ2 размыкается. Одновременно с отключением силовых контактов, обеспечивающих питанием соединение обмоток звездой, происходит замыкание БКМ2 в цепи управления КМ1 и размыкание БКМ2 в цепи питания РВ.
Но, поскольку РВ отключается с запаздыванием, этого времени достаточно, чтобы его нормально разомкнутый контакт в цепи КМ1 оставался замкнутым, благодаря чему происходит самоподхват КМ1,подключающий соединение обмоток треугольником.
 Нормально разомкнутый контакт самоподхвата КМ1
Нормально разомкнутый контакт самоподхвата КМ1
Недостаток классической схемы
Если по причине неправильного расчета нагрузки на валу он не сможет набрать обороты, то и реле тока в этом случае не позволит схеме переключиться в режим треугольника. Длительная эксплуатация эл. асинхронного двигателя в таком режиме стартовой перегрузки крайне нежелательна, обмотки будут перегреваться.
 Перегретые обмотки двигателя
Перегретые обмотки двигателя
Поэтому, для предотвращения последствий непредвиденного увеличения нагрузки при пуске трехфазного эл. двигателя (изношенный подшипник или попадание посторонних предметов в вентилятор, загрязнение крыльчатки насоса), следует также подключить тепловое реле в цепь питания эл. двигателя после контактора КМ (на схеме не указано) и установить датчик температуры на кожух.
 Внешний вид и основные узлы теплового реле
Внешний вид и основные узлы теплового реле
Если используется таймер (современное РВ) для переключения режимов, которое происходит в установленном интервале времени, то при включении обмоток двигателя треугольником, происходит набор номинальных оборотов, при условии, что нагрузка на валу соответствует техническим условиям работы электромотора.
 Переключение режимов при помощи современного реле времени CRM-2T
Переключение режимов при помощи современного реле времени CRM-2T
Работа самого таймера достаточно проста – вначале осуществляется включение контактора звезды, а по истечении регулируемого времени, происходит отключение данного контактора, и с некоторой также регулируемой задержкой осуществляется включения контактора треугольника.
Правильные технические условия для использования переключения соединений обмоток.
При пуске любого трехфазного эл. двигателя должно соблюдаться важнейшее условие – момент сопротивления нагрузки всегда должен быть меньше чем стартовый момент вращения, иначе электромотор попросту не запустится, а его обмотки перегреются и перегорят, даже если используется стартовый режим звезды, при котором напряжение ниже номинального.
Даже если на валу свободно вращающаяся нагрузка, стартового момента при подключении звездой может не хватить и эл. двигатель не наберет обороты, при которых должно осуществляться переключение в режим треугольника, так как сопротивление среды, в котором вращаются механизмы агрегатов, (лопасти вентилятора или крыльчатка наноса) будет увеличиваться по мере набора скорости вращения.
В таком случае, если из схемы исключено токовое реле, и переключение режимов осуществляется по уставке таймера, то в момент перехода на треугольник будут наблюдаться всё те же броски тока почти такой же продолжительности, как и при пуске с неподвижного состояния ротора.
 Сравнительные характеристики прямого и переходного запусков двигателя с нагрузкой на валу
Сравнительные характеристики прямого и переходного запусков двигателя с нагрузкой на валу
Очевидно, что такое подключение звезда-треугольник не даст никаких положительных результатов при неправильно рассчитанном стартовом моменте. Но в момент отключения контактора, обеспечивающего подключение звездой, при недостаточных оборотах двигателя, вследствие самоиндукции будет наблюдаться бросок повышенного напряжения в сеть, которое может повредить другое оборудование.
Поэтому, используя переключение звезда-треугольник, необходимо убедиться в целесообразности такого подключения трехфазного асинхронного эл. двигателя и перепроверить расчеты по нагрузке.
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей .
Частота вращения ротора равна
![]()
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором . При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.

Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания

При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U 1 . Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U 1 необходимо производить пропорционально квадратному корню изменения частоты f 1 .
При регулировании установок с вентиляторной характеристикой , необходимо изменять подводимое напряжение U 1 пропорционально квадрату изменения частоты f 1 .
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Кроме реостатного и прямого способов пуска асинхронных двигателей существует другой распространенный способ – переключением со звезды на треугольник .
Способ переключения со звезды на треугольник используется в двигателях, которые рассчитаны на работу при соединении обмоток треугольником. Этот способ осуществляется в три этапа. В начале, двигатель запускают при соединении обмоток звездой, на этом этапе двигатель разгоняется. Затем переключают на рабочую схему соединения треугольник, причем при при переключении нужно учитывать пару нюансов. Во-первых, нужно правильно рассчитать время переключения, потому что если слишком рано замкнуть контакты, то не успеет погаснуть электрическая дуга, а также может возникнуть короткое замыкание. Если переключение будет слишком долгим, то это может привести к потери скорости двигателя, а в следствии к увеличению броска тока. В общем, нужно четко скорректировать время переключения. На третьем этапе, когда обмотка статора уже соединена треугольником, двигатель переходит в установившийся режим работы.
Смысл этого способа в том что, при соединении обмоток статора звездой, фазное напряжение в них понижается в 1,73 раз. В такое же количество раз уменьшается и фазный ток, который протекает в обмотках статора. При соединении обмоток статора треугольником фазное напряжение равно линейному, а фазный ток в 1,73 раза меньше линейного. Получается, что соединяя обмотки звездой, мы уменьшаем линейный ток в 3 раза.
Чтобы не запутаться в цифрах, давайте рассмотрим пример.
Допустим, рабочей схемой обмотки асинхронного двигателя является треугольник, а линейное напряжение питающей сети 380 В. Сопротивление обмотки статора Z=20 Ом. Подключив обмотки в момент пуска звездой, уменьшим напряжение и ток в фазах.

Ток в фазах равен линейному току и равен

После разгона двигателя, переключаем со звезды на треугольник и получаем уже другие значения напряжений и токов.

Как видите линейный ток при соединении треугольником больше в 3 раза линейного тока при соединении звездой.
Данный способ запуска асинхронного двигателя применяется в тех случаях, когда присутствует небольшая нагрузка, либо когда двигатель работает на холостом ходу. Это связано с тем, что при уменьшении фазного напряжения в 1,73 раза, согласно формуле для пускового момента которая предоставлена ниже, момент уменьшается в три раза, а этого недостаточно, чтобы совершить пуск с нагрузкой на валу.

Где m – количество фаз, U – фазное напряжение обмотки статора,f – частота тока питающей сети, r1,r2,x1,x2-параметры схемы замещения асинхронного двигателя,p – число пар полюсов.